网上营业厅
掌上营业厅


地球是一个被水覆盖的行星,表面约71%是海洋。大海不仅面积广阔,而且深不可测,其中物种多样,矿产丰富。百年来,人类从未停止对大海的认知和探索。
从海平面到水下1000米是临地空间的一部分。在这个区域中,物种的多样性构成了复杂的生态系统和丰富的海产资源,它将是人类活动“向下”拓展的重要空间。
然而,由于海水的不均匀特性,光线会被吸收和散射。因此,“智能光电”技术应运而生,可以实现在暗淡的环境中对光信号进行探测、传输,及智能化感知和分析。
中国电信人工智能研究院(TeleAI)正在加速推进“智能光电”技术的研究工作,并与智能体、智传网(AI Flow)、AI治理形成“三智”+“一治”的完整战略布局。

临地空间与人们的现实生活紧密相关,TeleAI希望通过AI驱动包括赛博空间、临地空间、广域空间在内的“三大空间经济”发展,进一步拓展人类的活动范围。
随着机械工程、计算机、人工智能等技术的突飞猛进,自主水下航行器(Autonomous Underwater Vehicle,AUV)的应用得到进一步发展。
从深海进入到深海开发,AUV扮演着至关重要的角色。AUV能够自主航行进入更深的水域空间,无需通过脐带电缆与其他平台连接,就能执行各种任务。
然而,由于AUV造价昂贵,且携带大量珍贵的海洋数据,在完成任务后,通常需要以“导引回收”的方式使其安全返航,保障数据完整,并实现设备的重复利用。
为了提高AUV末端光学导引回收的精度,中国电信CTO、首席科学家、中国电信人工智能研究院(TeleAI)院长李学龙教授带领团队展开深入研究,提出了“自主水下航行器多分支网络光学导引定位方法”。
该方法旨在为AUV在能源补充、数据传输和指令下达等方面提供更快的解算速度、较低的算力功耗需求以及较少的能量消耗。
相关论文已在中国精品科技期刊《中国科学:信息科学》正式发表。
论文地址:
https://www.sciengine.com/SSI/doi/10.1360/SSI-2024-0183;JSESSIONID=8df64795-11e5-4fe3-8024-f4e0cd442a7c
突破与创新
团队搭建了基于多象限测角的光学导引定位硬件系统,提出了多分支回归网络的AUV光学导引定位方法。
该方法首次将深度网络引入多象限测角的光学导引定位位置解算任务中,设计了多分支结构的位置解算回归网络。研究了数据驱动的多维度定位约束训练方法,构建了水下光学导引定位系统的物理几何关系,实现光学导引硬件与算法的一体化设计。通过解算多象限光电探测器采集的导引灯偏角数据,获取了AUV与导引灯的相对位置,实时输出AUV的即时位置坐标,完成了海试验证。
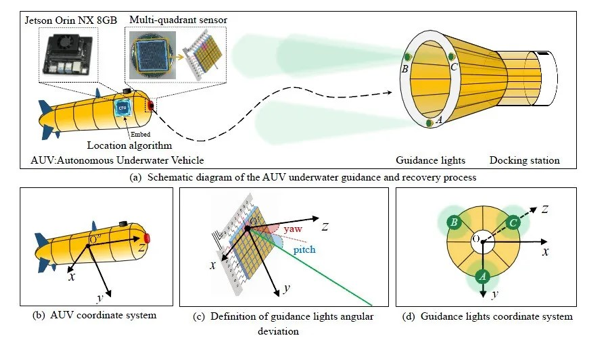 AUV导引定位系统示意图
AUV导引定位系统示意图
创新点1:导引硬件与算法一体化设计
为了实现水下光学导引大视角的高精度定位,团队采用了多象限光电探测器,分析了导引灯组排布与AUV的物理几何关系,建立了光学导引偏角-位置的数学模型。
从导引灯的几何排布角度出发,在理论上证明了使用三个非共线排布的导引灯可以确保导引灯偏角数据与AUV位置(简称偏角-位置)的一一对应关系,是保证在算法层面产生唯一位置真值解的重要前提条件。
创新点2:多分支结构的位置解算回归网络
为了提升模型的表示能力,团队设计了多分支结构的位置解算回归网络,通过多象限光电探测器获取的导引灯偏角信息,将AUV位置解算的任务视为回归问题,采用了编解码器结构,提高了位置解算精度和速度。
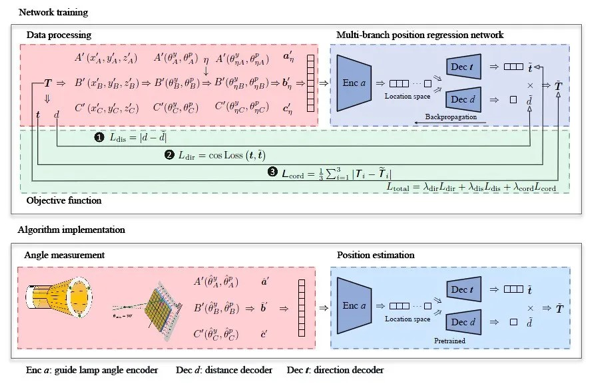 AUV多分支网络光学导引定位方法技术路线图
AUV多分支网络光学导引定位方法技术路线图
创新点3:多维度的空间位置约束目标函数
为了更高效地指导网络模型参数优化,团队从方向、距离、坐标三个维度设计网络模型目标函数,建立了多维度空间定位精度约束,进一步提高了网络模型的解算精度和泛化能力。
实验结果
在AUV导引回收任务中,全面评估定位精度对于确保方法效果至关重要,团队通过在不同距离的定位精度实验,展示本文方法在位置解算的准确性。
本文方法在0.8m至20m范围内的坐标定位精度实验数据如下图所示。可以看出,绝对坐标误差随着距离的增加而增加,由统计分析可得,其均值58.292mm@0.8~20m,标准差为 43.347mm@0.8~20m。
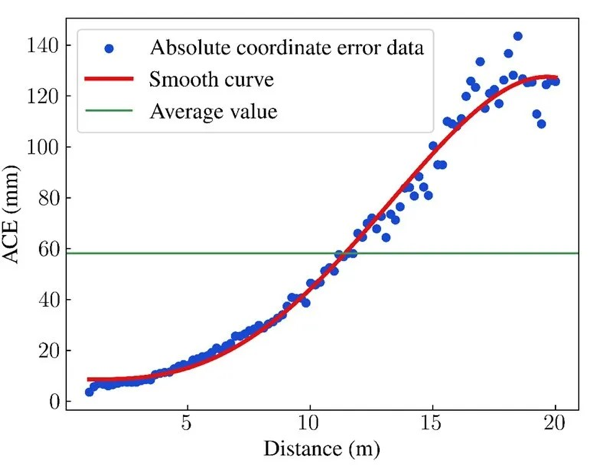 不同距离的定位精度分布图
不同距离的定位精度分布图
为了直观展示多分支网络光学导引定位方法的位置坐标解算精度,团队设计了仿真轨迹以进一步测试AUV坐标预测轨迹的可视化结果。
轨迹仿真实验中采样了80个点,其坐标解算的绝对坐标误差均值为41.256mm@0.8~20m,绝对坐标误差最大值为143.847mm@0.8~20m,绝对坐标误差最小值为3.276mm@0.8~20m。
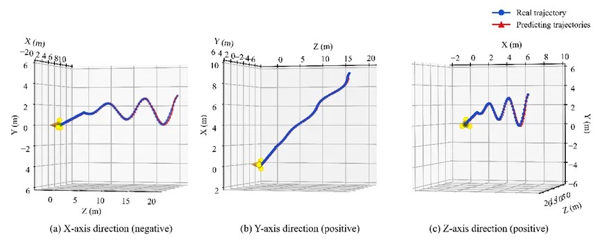 轨迹预测结果图
轨迹预测结果图
在相同的验证条件下,团队同样使用物理仿真随机生成的10万组偏角-位置数据,使用多项式回归算法、支持向量回归算法、决策树算法和随机森林回归算法,与多分支结构的位置解算回归网络算法在0.8~20m的导引范围内对定位坐标精度进行比较。
与传统回归算法相比,多分支结构的位置解算回归网络的绝对坐标误差均值仅为58.292mm,展现出更高的定位精度。这一结果表明了多分支回归网络在特征提取和非线性建模上的优势,尤其在处理复杂定位任务时,表现出了更高的定位精度。
为了验证多分支网络光学导引定位方法的位置解算精度,团队在自然资源部北海海洋技术中心海港港池开展了海试验证。三条轨迹的坐标真实值和预测值结果如下图所示。
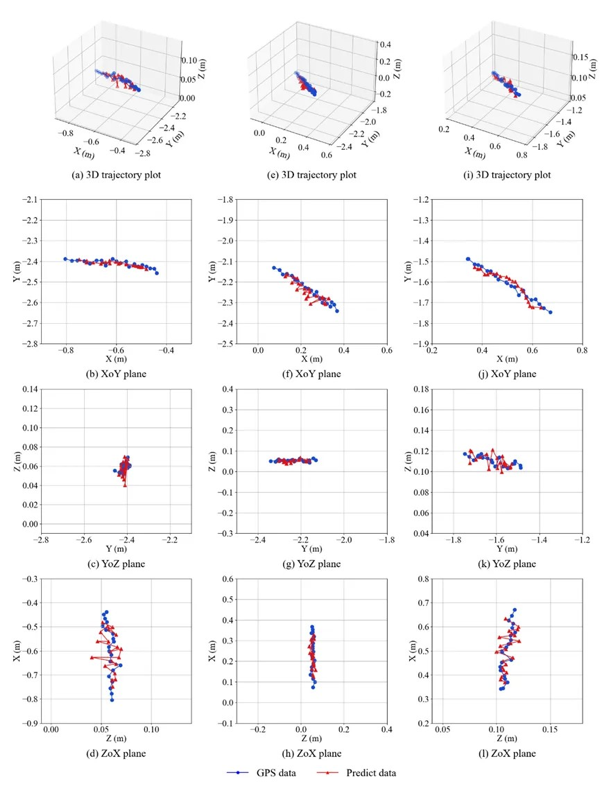 海试实验轨迹预测结果图
海试实验轨迹预测结果图
通过对绝对坐标误差进行计算和统计,得到预测轨迹点与采集的GPS轨迹点平均绝对坐标误差在35.102mm@1~3m,而仿真实验的平均误差仅为6.646mm@1~3m,与海试数据存在差距。
这是由于海试误差除了算法本身存在的误差以外,主要是由GPS的测量误差和多象限光电探测器的测量误差造成。
因此,海试中的误差积累难以避免导致了仿真和实验存在定位误差差异。同时,综合GPS和多象限光电探测器的测量误差来看,海洋试验的误差仍在合理范围内,验证了该方法在海洋环境中仍可以实现预期的精确定位。

 新浪微博
新浪微博 今日头条
今日头条 腾讯微信
腾讯微信

